19th January 2009
The Delft Biorobotics Lab, at the Delft University of Technology, the Netherlands, currently focuses its work on humanoid robots. The lab has extensive experience in biped robots, with the first biped robot dating back to 1995.
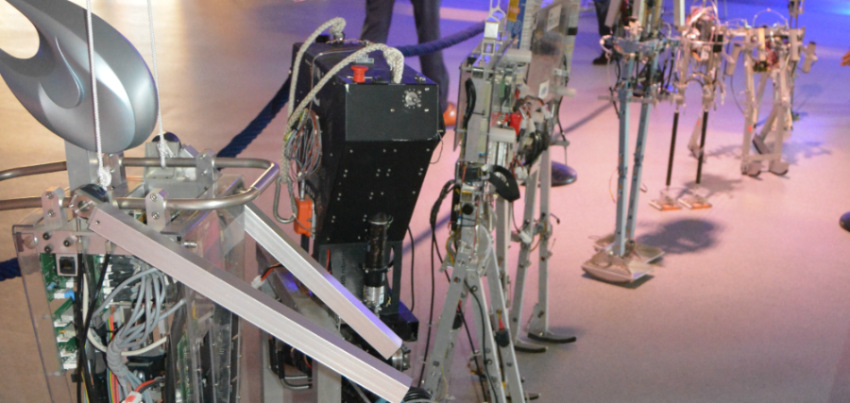
The FLAME robot is the 10th generation and was completed in the spring of 2008. Flame, named after the shape of its head which represents the logo of the University, is an active walker. This means that the robot is using actuators to control its gait. Studying gait with robots is interesting to learn how a human actually walks and in order to improve power performance and stability of the robot.
Flame uses the MTi for its stability, actually as an organ of balance, its data proved to be of great importance. The MTi is lightweight and is easy to build in. The low response time of the MTi means that Flame does not fall to the ground when there is a moment of instability. If the robot should be put out of balance with a push from the right, it will detect that it is falling to the left and put the left feet a little bit more to the left. Because of the on-board processor, the MTi could be easily connected to a low-power PC104 processor.
Next, the Delft University of Technology will compete with Tulip, a robot that was jointly-developed by three technical universities and Philips in the Netherlands, which has competed in the RoboCupSoccer 2008 World Championships in China and will strive for the podium in 2009.
Customer
Technical University Delft, Delft, Netherlands
Website
Are you interested our solutions? Please click on the button below to contact us.

Related articles