The 2011 Grand Cooperative Driving Challenge (GCDC) aims to bring industry and academia together to build vehicles that, by communicating with each other, can achieve safe and efficient platooning behaviour. The vehicles will be semi-autonomous in the sense that they are automatically controlled only in the longitudinal direction. By using radio communication information about the state of vehicles further ahead can be used to design controllers that enable safer and more efficient platooning than if only the preceding vehicle is considered.
The CoAct project is an umbrella organization for the three Swedish teams participating in GCDC. The various teams are connected to three universities: Halmstad University, Chalmers University of Technology, and Royal Institute of Technology. The CoAct project, jointly organized by the Viktoria institute and SAFER, also includes several industrial partners: Volvo Car Corporation, Volvo Technology, Scania, Denso, Fengco, dSpace and Test Site Sweden. Additional equipment sponsors of the Halmstad team include Xsens and PreScan.
The GCDC competition rules dictate that vehicles should provide their absolute position with accuracy “under one meter”. In addition, the competition organizers provide a base station for GPS corrections, which led to the use of an RTK-GPS to achieve the necessary absolute positioning accuracy.
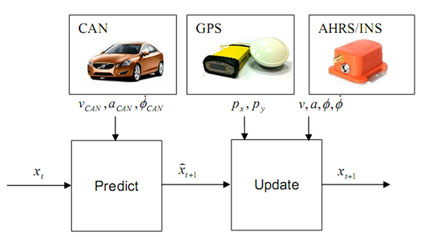
Although the RTK-GPS typically provides high accuracy position information it also has drawbacks that must be addressed. When satellite visibility is poor, such as when driving under a freeway overpass or close to tall obstacles, positioning accuracy is quickly degraded. Additionally, since the GPS provides only a point measurement, heading information is very poor at low speeds. To counter these effects GPS data is combined with vehicle information (wheel speed and steering wheel angle measurements) from the CAN bus together with data from an inertial sensor (Xsens MTi-G, now MTi-G-710) using an extended Kalman filter (Figure 2). The filter uses the vehicle information in the prediction stage and GPS and inertial measurements in the update stage. The inertial sensor used is the Xsens MTi-G which is a full attitude and heading reference system (AHRS) that fuses data from built-in accelerometers, gyros, magnetometers, barometer and GPS. In Halmstad University’s GCDC vehicle the MTi-G is used to provide reliable heading, velocity and acceleration data.
Figure 2: Vehicle state is estimated using data from vehicle information, GPS and AHRS sensors.
The figure below illustrates a situation during track testing when the position as reported by the GPS (green line) is erroneous due to a building next to the track, in the filtered position however these disturbances are mitigated (red line).
Figure 3: GPS disturbances are handled by incorporating data from the vehicle and AHRS sensors.
Team Captain Kristoffer Lidström adds: “The MTi-G really helped us to maintain a good position fix even when our RTK-GPS system lost track under the bridges on the competition course, it has worked reliably throughout development, testing and competition!”
{kind=link}
{kind=link}