27th February 2014
Ionuț Scîrlet, Marc Kraft, Medical Technology Department, Technische Universität Berlin, Germany, scirlet_ionut@yahoo.com
Introduction
Marker-based tracking systems are the established standard for kinematic data measurement. However they require specially equipped laboratories. The spatial restriction and risk of incomplete data caused by the masking of the optical markers does not allow their use in real work environments. MEMS inertial sensors offer a powerful alternative, in that they enable the recording of kinematic data from patients in real, day to day situations.
This opens new doors to the field of gait analysis, as mobile gait analysis systems could be used to gain a much more complex and objective perspective of the human gait. Mobile gait analysis systems allow gathering of data from patients with leg prosthetics under real life conditions, which is essential for the future development of the leg prosthetics.
The main goal of this master thesis is to develop one important component of a mobile gait analysis system namely the kinematic part. For this purpose, a software was developed to compute segment and joint angles of the lower extremities of the body as well as trunk angle, but also to display a human model in real-time.
Methods
Algorithms were generated to gain kinematic data from the MTw Development Kit system of the company Xsens Technologies B. V. Hereby the sensor positioning was first estimated, and then the rotation around the vertical axis was removed due to drifts of the yaw angle. The drift is mainly caused by ferromagnetic materials in the prosthetics as well as by components of another measurement system. Conducted experiments showed that 5 cm distance between one MTw unit and the disturbance source reduces substantially the perturbance of the recorded magnetic field. However a greater distance is recommended. (Xsens: another option is to use the Xsens Magnetic Field Mapper, which is part of the MTw SDK, to cancel out a constant perturbance of the magnetic field. This will result in a stable and accurate yaw angle output)
The human model was developed using corrected rotation matrices and translation vectors which define the distances between the joints of the model. The vertical positions for both thigh sensors and sacral sensor were computed and then implemented in the human kinematic chain for a very close to reality model.
In the virtual 3D space the floor was used as geometric constraint, so that during gait the foot does not go under the floor.
The computation algorithms as well as the human model were then integrated in the Human Kinematics software, which has the following features:
- Open data;
- Compute valid orientation data;
- Save data;
- Display human model in four speed settings, from real-time to 25% of the real-time speed;
- Five standard viewing angles and one custom setting. The custom setting allows the user to choose the desired viewing angle;
- Slider function to jump forwards or backwards in the data;
- Freeze the human model in order to analyze a certain posture of the human body;
- Stop and exit function in order to stop the motion and exit the software
For the validation of the developed algorithms, the sagittal angles from twelve measured data sets of two volunteers with femoral prostheses were used. The projected angles in the sagittal plane of the room from a stationary optical Vicon 460 system were taken as reference. The differences between the angles from the two systems were computed using the root-mean-square-error (RMSE).
Results
The mean RMSE(s) obtained for the thigh, knee and ankle angles on the prosthetic and healthy side are 0,95° ± 0,59°, 0,60° ± 0,27° and 2,16° ± 0,61°, and 1,43° ± 0,45°, 2,46° ± 1,07° and 4,39° ± 0,71° respectively.
The differences for thigh and knee angles were further minimized by optimising the positioning of the sensors, obtaining for three measured data sets an average RMSE of 0,43° ± 0,13° and 0,43° ± 0,09° on the prosthetic side and 1,08° ± 0,15° and 1,48° ± 0,17° on the healthy side.
Compared with the other two angles, greater errors were obtained for the ankle angle, due to the angle projection in the sagittal plane of the reference system.
Conclusion
The achieved results show a high validation grade. The mean RMSE(s) obtained for the thigh and knee angle are under or near the instrumental error of the MTw Development Kit system (dynamic accuracy of 2 degrees of RMS).
Optimal positioning of the sensors on the body reduces the influence of magnetic field disturbances on the prosthetic side and of tissue movements on the healthy side.
The optimal positioning of the sensors reduces also the errors caused by the oblique sensor positioning.
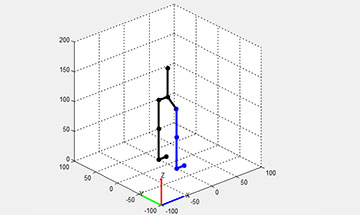
The developed Human Kinematics software, with its various implemented features, enables the real-time representation of the motion model. The leg in blue represents in this example the side with the transfemoral prosthesis. The software can be easily extended in order to display the angles as well.
Acknowledgement
This master thesis has been developed at the Medical Technology Department of the Berlin Institute of Technology in the context of the project “Messtechnikbasierte Gangbildoptimierung bei transfemoral Amputierten” (mebGO). The cooperative research project mebGO is supported by the German Federal Ministry of Education and Research (BMBF, grant 13EZ1112A).
Are you interested our solutions? Please click on the button below to contact us.

Related articles



